Stereo vision systems give the robots depth perception skills, which make artificial machines and systems develop an understanding of their environment by estimating the relative distance of objects in their vision from many visual cues. Hence, stereo vision is used in many areas of robotics, such as self-driving cars, drones for rescue missions, robots for remote surgery.
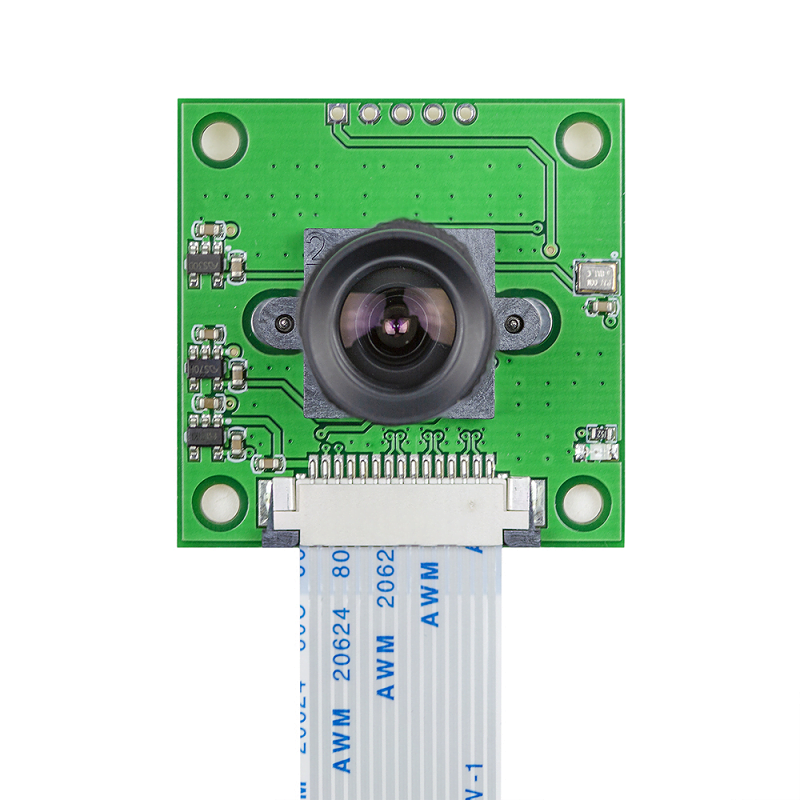
Arducam released this Stereo Camera MIPI Module Series for Raspberry Pi and Jetson Nano/Xavier NX. They directly connect to the MIPI CSI-2 connectors of the motherboards and run with a V4L2 camera driver on those platforms. They offer better flexibility to be integrated into your own hardware design or run with your own algorithm on embedded systems for applications like depth sensing, 3d mapping, SLAM, etc.
Specifications
| Image Sensor | Dual Monochrome global shutter OV2311 |
| Pixel Size (um) | 3 x 3 |
| Lense Viewing Angle (FOV) | 83 |
| Pixel Resolution | 1600 x 1300 |
| Length (mm) | 105 |
| Width (mm) | 24 |
| Height (mm) | 20 |
| Weight (gm) | 26 |
| Shipment Weight | 0.03 kg |
Features:
- Sensor: Dual Monochrome global shutter OV2311
- Pixel Size: 3 μm x 3 μm
- Active Array Size: 1600 x 1300
- Optical Size: 1/2.9 inch
- Focus Type: Fixed focus
- Focusing Range: 30mm ~ infinite
- Output Interface: 2-lane MIPI serial output
- Output Formats: 8-bit/10-bit RAW
- Maximum Image Transfer Rate: 2*30fps@1600 x 1300
- Lens: Default low distortion M12 lens (Part Number: M27280M07S)
- EFL: 2.8, F.NO: 2.8, HFOV: 83 Deg.
- IR Sensitivity: Sensitive to IR, No IR filter
- Board Size: 105(L) x 24(W) x 20.1(H) mm
Package Includes:
- 1 x Arducam 2MP Stereo Camera for Raspberry Pi, Nvidia Jetson Nano/Xavier NX, Dual OV2311 Monochrome Global Shutter Camera Module
- 1 x 150mm 15pin 1.0mm pitch FPC cable
- 1 x 150mm 15pin 1.0mm to 22pin 0.5mm pitch FPC cable